Explore the Extended Kalman Filter, the main mathematical algorithm that is employed in Cassiopeia's detection system to combine multi-sensor data and collapse the debris locational uncertainty more efficiently.

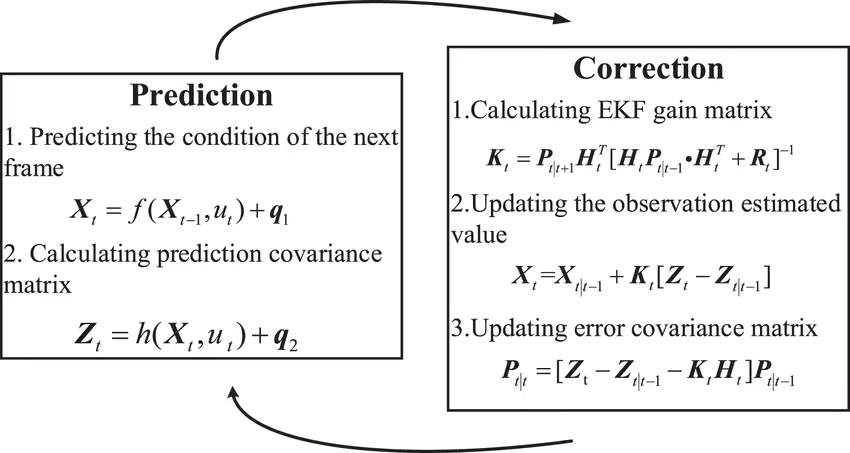
The Extended Kalman Filter (EKF) is an algorithm that estimates the state (like position, velocity, orientation) of a nonlinear dynamic system, making it suitable for real-world applications like our mission. It's distinctive predict-update recursive system works by iteratively predicting the next state and then correcting that prediction using noisy sensor measurements, taking into account the uncertainties in the system.

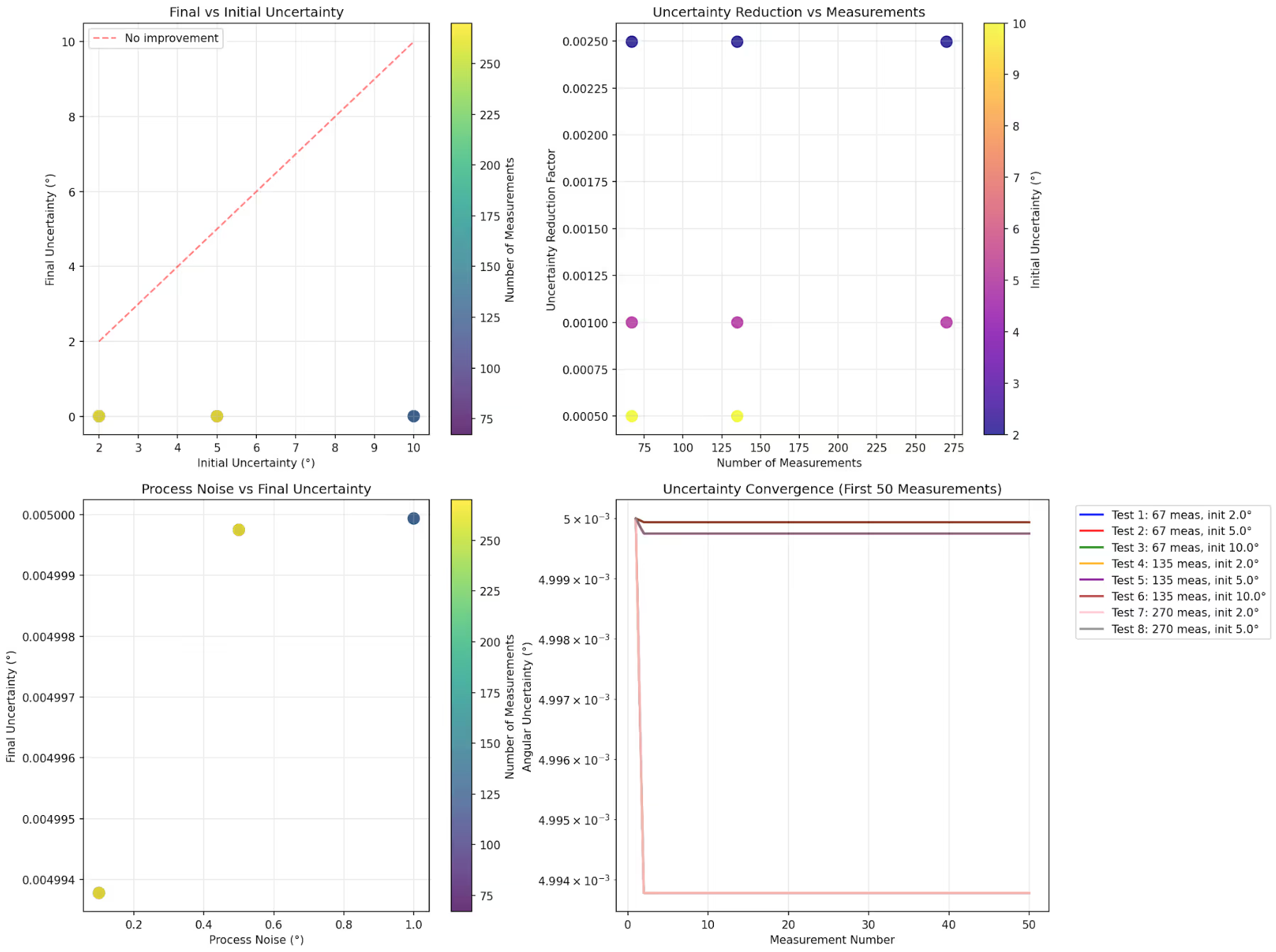
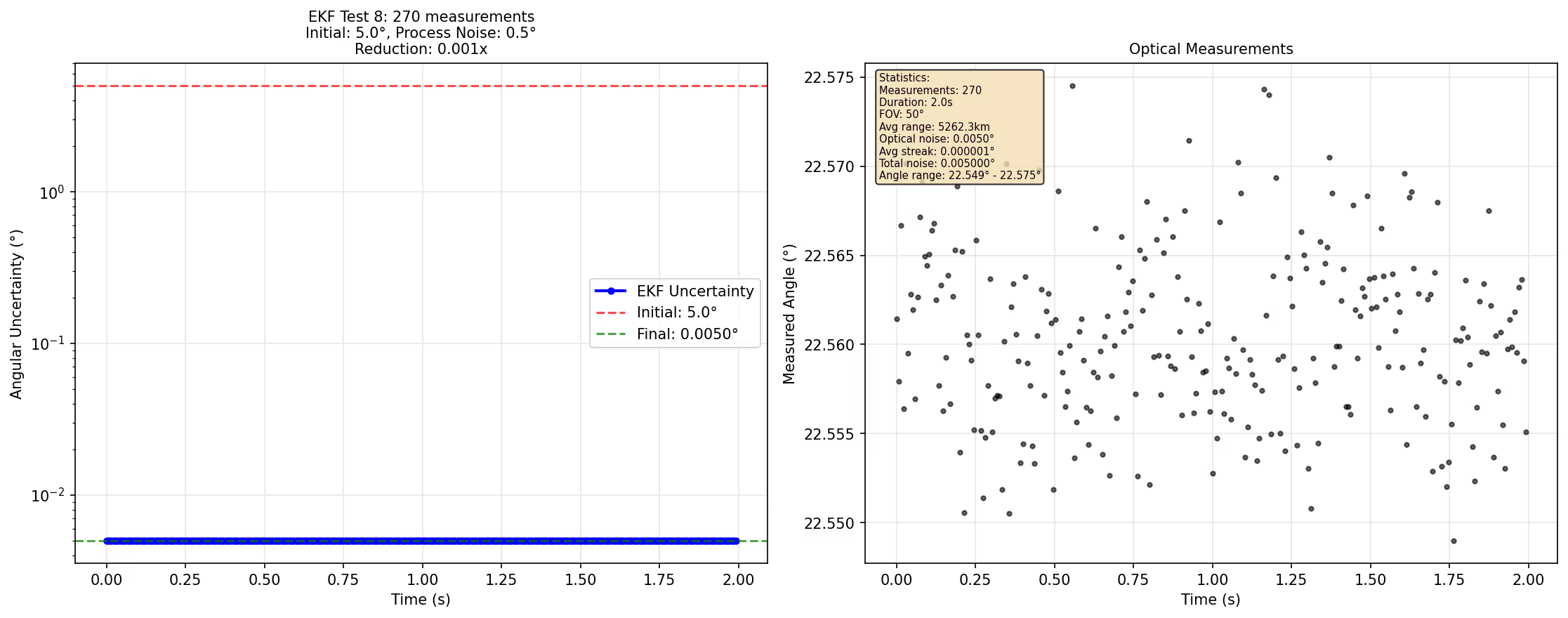
To quantify the effectiveness of our detection pipeline, we created a simple Python simulation that models how the EKF algorithm narrows down the uncertainty of the debris location based on the number of detections from our optical sensor. View some of our simulation features and results here.
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Suspendisse tincidunt sagittis eros. Quisque quis euismod lorem.
.avif)